Wind energy extraction for sailplane models

By Matthieu Scherrer
|
Wind energy extraction for sailplane models
By Matthieu Scherrer |
It has been a long time since I wanted to understand how one can get so much energy in model DSing. Here is the summary of my thinking and reading on the subject, applied specifically to sailplane model
A DS experiment
I did experience one situation specific situation that make doubt me the classical wind strength shear explanation was not the only mechanism in DS. Here is the story.
I fancy starting DS with low energy : the acceleration is even more aggressive and impressive, since you start with little speed. I once started this way the first DS cycle and while crossing the shear layer the glider was really shaken (too slow!) and it just stopped.
So I was on the back side, under the shear region, without energy. I thought "huw huw, this time this is the end".

But no ! While going quite far and
low backside, the glider enter an area where it was as if rockets were firing
up. The acceleration was really great, and I got so much energy in just 1/4
of cycle that I was able to reach the shear region again, and to be back on
the front side of the mountain.
This may have been a lucky scenario, but something happened here that ring me
a bell about DS mechanism. Something was to be understand
about this…
Here is the classical explanation you often find about DSing. We often hear something that sounds like this statement : “As you you encounter a gust, the airspeed increase give you some energy”. A typical DS situation when you encounter a gust is crossing the shear layer behind a mountain. This is more or less linked to the following understanding of the mountain airflow :
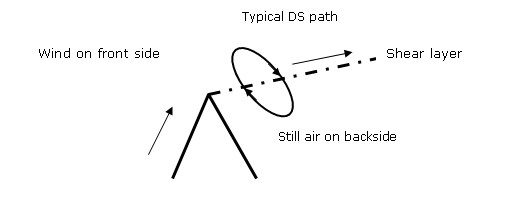
Each time you cross the shear layer, from windy front-side to still backside as well as from still backside to windy front-side, you have a gust. The value strength of this gust is the wing force. Some basic analysis shows that the energy gain is proportional to the mass of the sailplane and the gust squared :
I am sure this mechanism explain part of the energy we get while Dsing, but it explains only partly why we can get so fast. It does not explain at all how I could get out of backside as detailed in my DS experiment
Wind direction and inertial speed direction
combination theory
The principle explained as follows : “Any wing component perpendicular to the inertial speed will create an apparent thrust created by the so tilted aerodynamic lift, that gives energy to the glider”
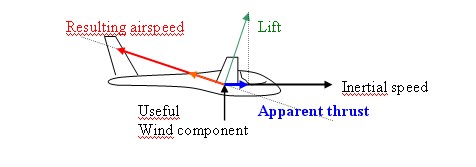
Then energy comes from the different orientation between inertial (ground) speed and airspeed seen by the glider. Indeed aerodynamic lift is perpendicular to the airspeed, whereas energy stuff is linked to the inertial speed .The tilt created by the wind component create a thrust component on the inertial speed axis, that is on the trajectory. Also, the higher the lift, the higher the thrust. That is the higher the G-load the higher the thrust.
To put it in a nutshell to get maximum energy from the wind, as Lissaman said [3], you have to fly the glider “belly to the wind”. Now we have to find any strategy to get that useful wind component coming to the belly, during an sufficient period of time.
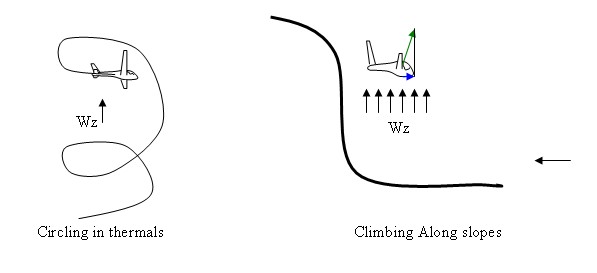
The first solution to have such a “belly to the wind” situation is to perform a level or slightly banked, while staying in an area where a vertical wind exists. This is the classical way to climb in thermal or above slopes. While flying within the up-rising air region, you have the wind coming up to the belly
Variant : dolphin flying
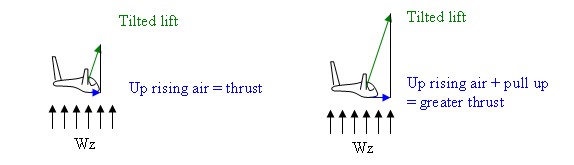
An idea developed in order to maximize energy transfert is the so called “Dolphin flight”. By pulling up firmly, you increase the lift for a short period of time, that is you increase the thrust force created by the tilted lift into the up rising air.
The trouble is you can stay a long time under G-Load in dolphin flight (unless you make a full loop….), so that the period of time you maximise energy tranfert is very short.
It is not clear either to decide whether over the short period of time, then gain is really worth the manoeuvre. In fact, drag also increase during pull up. Also performing the manoeuvre too late or too soon may do more harm…
Anyway the pull up speeds the glider down, so after that spend more time within rising air…
DS is also a situation where you are taking benefit of the orientation of wind, trying to fly “belly to the wind” in the wake of an obstacle such as a mountain.
An ideal situation would be the following : at any position over the trajectory, the wind is so oriented that you have only a “wind to the belly” component. That is at any station of the trajectory, you have a thrust component due to lift tilt, and the sailplane keep acceleration. A very simple solution to get this is to find a radial wind pattern, such as :
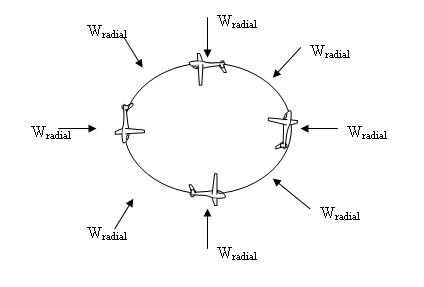
The only trouble is : have you ever seen such a wind pattern in real life ?? If you find it, tell me !!
So, we shall stop dreaming and go to a more realistic situation. ;-)
Here is the sketch for a more realistic situation.
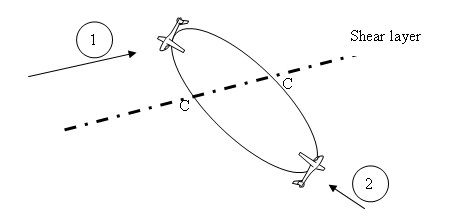
Instead of speeding up all around the cycle just as in our unrealistic example, we have two main zones were the glider are extracting energy from atmosphere.
I am sure what I did experience was linked to the region 2 specificity : I reach a region far in the backside where the wind was so oriented that the energy transfer was huge.
Front side (region 1) is more or less independent from wind strength. It should have always more or less the same pattern on this side.
On the contrary, in the backside, separated flow pattern behind an obstacle such as a mountain is very sensitive to many parameters. It should certainly have a Reynolds number based on a typical dimension of the slope, that allows defining different regimes.
It means the exact pattern behind is likely to move a lot with time, depending on the actual wind strength, orientation, and temperature…
It could well explain why the energy transfer experienced over a DS cession is not steady in time. For some minute every trajectory seems to firing up rocket, whereas some minutes later you circle quickly but smoothly.
It could well be linked to the fact that with very little wind strength difference, the region 2 could radically change.
In the detail, the flight-path that maximizes the energy gain will be very dependent of the exact flow pattern in the mountain wake. The next step, for increased performance, would to know exactly the wind pattern behind a mountain, to locate the area where we should turn.
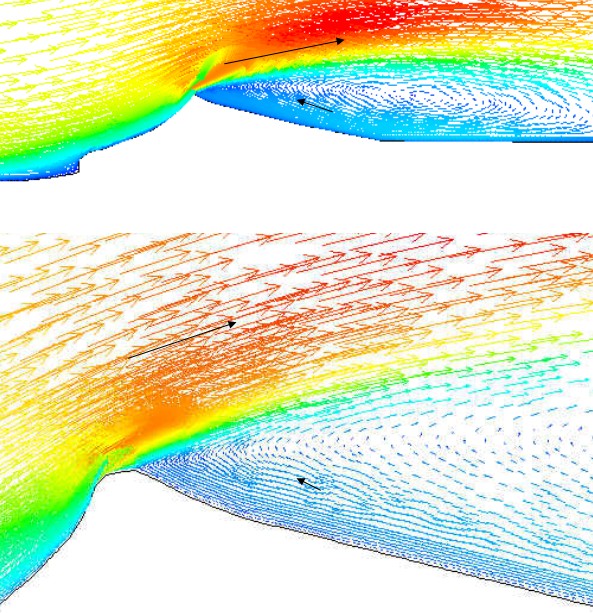
A solution could be to investigate backside with some visualization means.
Here are some attempts at computing and plotting the wind pattern near landscape, from [4].
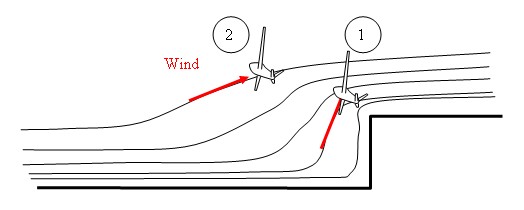
"German Cap Arkona Turn" analysys

French F3F pilots have been amazed of the turn technique they observe at Cap Arkona Viking Race (2004). The glider first start with a gentle pull-up while banked. Then he performs a high load turn quite far from the cliff edge, and come back heading to the cliff with a greater velocity. For sure this very particular trajectory aims at extracting a maximum energy from the wind pattern over the cliff. Here is a principle sketch :
This zone is less efficient for climbing on level flight. But when banked, the glider produces its belly to the wind, hence allowing great energy transfer.
More than taking benefits from wind strength gradient (which may be adverse…), the glider maximises the energy transfer by performing different manoeuvres in different area of the wind pattern. So, it takes benefit from wind orientation.
By using the so-called “German Cap Arkona Turn”, the glider benefit from the thrust effect of wind all over the path.
This is a typical example where path permanently suited to the wind pattern will help to reach high speed.
Considering F3F runs, the fact that this technique is efficient or not is also dependent of the effective length path increase, compared to the speed gain.
The thing is each slope has is own wind pattern, and sometimes for smoother slope the wind orientation pattern is not well suited for this flight technique.

Key point about extracting energy from the wind is to fly “belly to the wind” [3]. Keeping this very simple statement in mind, we can develop strategy for better DSing.
I hope this would provide some found for your thought !
Copyright
© 1998 - 2006 Planet-Soaring.com
No commercial use or publication (e.g. on other
www or ftp sites, print media) without the written consent from the author(s)